Latest publications
Predicting biological joint moment during multiple ambulation tasks
Camargo, Jonathan; Molinaro, Dean; Young, Aaron.
Journal of Biomechanics. 2022.
10.1016/j.jbiomech.2022.111020Subject-Independent, Biological Hip Moment Estimation during Multimodal Overground Ambulation using Deep Learning
Molinaro, Dean; Kang, Inseung; Camargo, Jonathan; Gombolay Matthew, Young, Aaron.
IEEE Transactions on Medical Robotics and Bionics. 2022.
10.1109/TMRB.2022.3144025
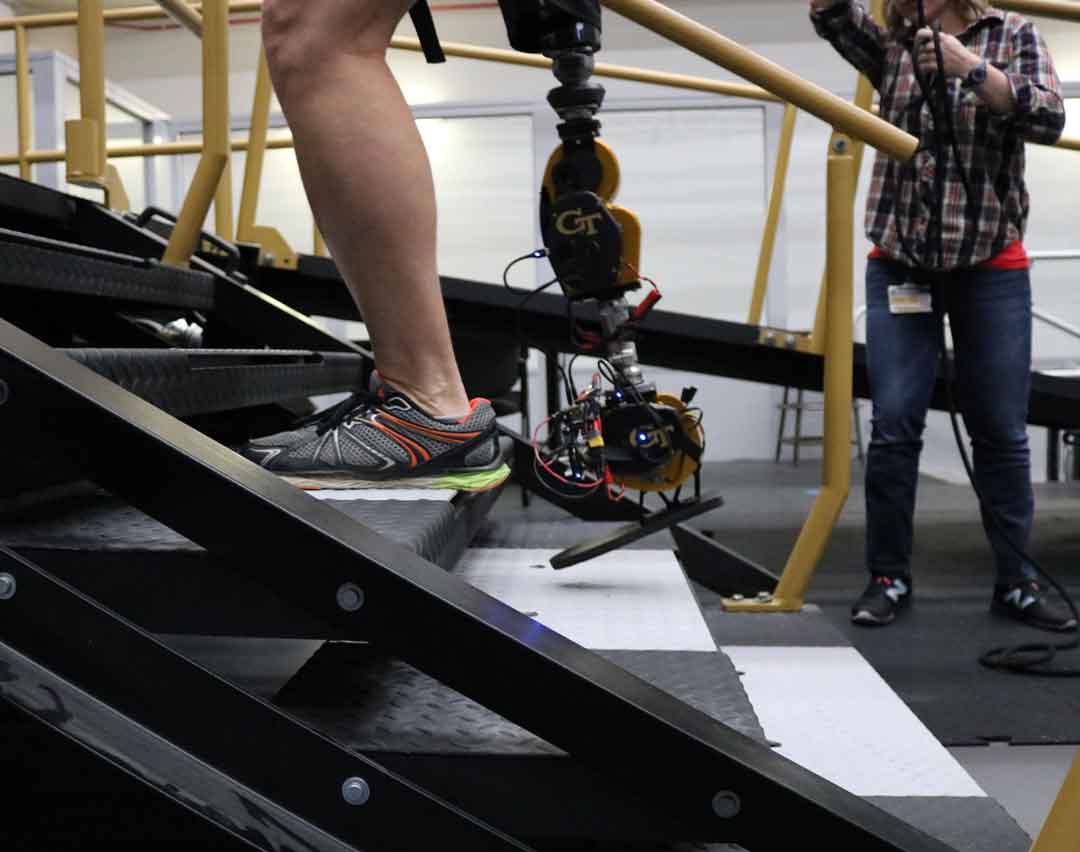
Prosthetics
Robotic systems are a potential solution for improving the quality of life for individuals with amputations. Some critical aspects of these technologies are: the capacity to generate positive work and localized sensors to obtain information about the system.

Biomechanics
Understanding human motion requires observation of the kinematics and external forces, all associated with a system with hundreds of degrees of freedom.
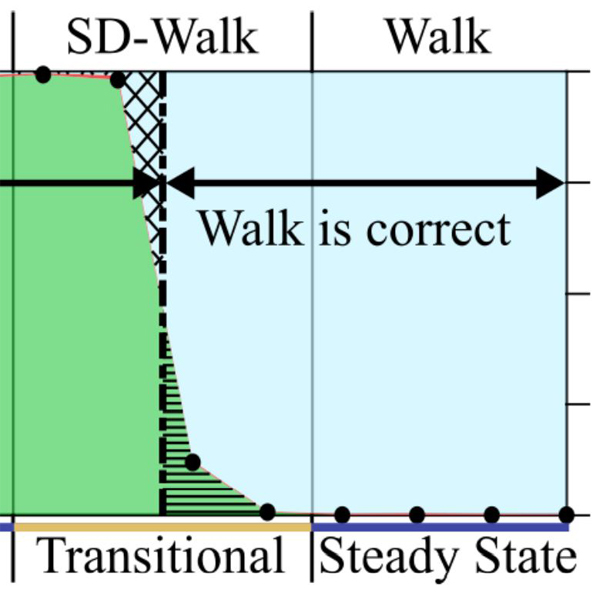
Machine Learning
Human augmentation systems should recognize the user activity without requiring manual input that imposes additional user efforts. I create models that can predict the user's intent and other state parameters that describe the locomotion.
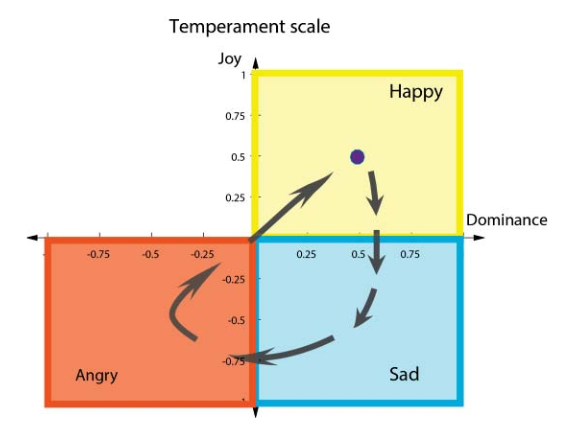
Human robot interaction
The future of robotics is with systems that can naturally work with humans. My work involves considering the user's needs, and the way they interact with the devices.
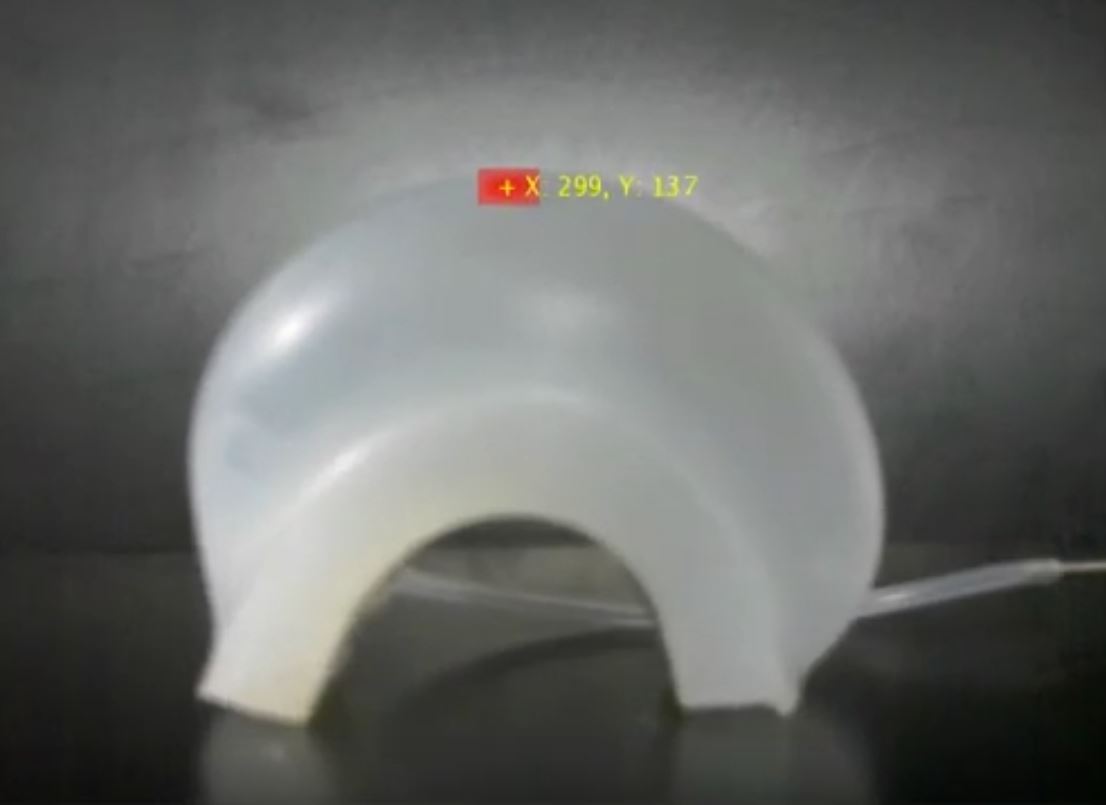
Other research
Excellent research can emerge by connecting ideas from multiple disciplines. Exploring other research areas has broadened my spectrum of knowledge and improved my core work.